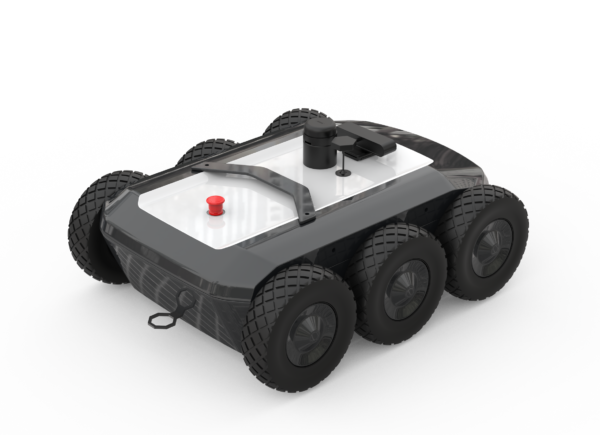
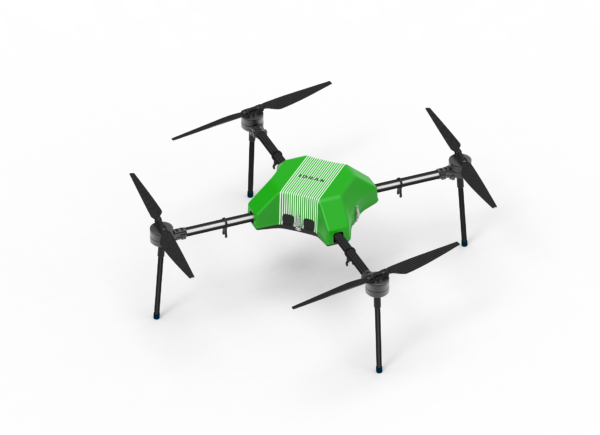
Проект « DGPS GNSS», создаётся для соответствия требованиям системам координат в современном мире технологий. Одним из главных примеров возможного применения точных систем координат являются беспилотные аппараты, которые позволяют выполнять многие задачи на автономном уровне. К таким задачам относятся:
Используя точную систему координат, станет возможным управление беспилотными аппаратами без повышенного риска столкновения с иными объектами.
Базовый приёмник имеет статичные координаты, которые изначально прописаны. Т.е., для получения данных координат не принимается сигнал со спутников. Также, используются и координаты, полученные со спутников, для их сравнения со статическими координатами, и выявления имеющихся погрешностей.
Ровер является вторым DGPS GNSS приёмником, координаты которой получаются только со спутников. Он интегрируются с удалёнными объектами, в целях их отслеживания. Получаемые ровером координаты также отправляются на специальный компьютер, где они корректируются исходя из уровня погрешности, полученной с базового приёмника.
ПО является связующим звеном между базовым приёмником и ровером, позволяющий вычислять погрешность полученных координат с точностью в 1 см .
Точная система координат различается от обычной системы координат тем, что сигнал сверяется одновременно с двумя DGPS GNSS-приёмниками. Первая из них — это база, которая получает сигнал от DGPS GNSS. Второй источник – это ровер, получающий свои координаты как от DGPS GNSS, так и от базовой станции.